
About Me
My research focuses on enabling robots to perform dexterous manipulation in unstructured, contact-rich environments by tightly integrating tactile perception, physical interaction, and robot learning. I work on flexible tactile sensors, visual-tactile manipulation policies, and their deployment on real-world platforms such as soft grippers, dexterous hands, and humanoid robots, with applications including deformable-object grasping, in-hand manipulation, and granular-media excavation.
I am currently a Postdoctoral Fellow in Prof. Fumin Zhang’s group at the Hong Kong University of Science and Technology (HKUST). I received my B.E. in Marine Engineering in 2018 and Ph.D. in Mechanical Engineering in 2025 from Huazhong University of Science and Technology (HUST), advised by Prof. Han Ding and Prof. Ye Yuan. My publications can be found on 
🔥 News
- 2026.05. One paper was accepted by National Science Review. DexAnyTwist, a general method for dexterous twisting proposed by my collaborator Xing Liu.
- 2025.08. Working as a postdoc in Prof. Fumin Zhang’s group in Hong Kong University of Science and Technology!
- 2025.01. 🎉🎉 Welcome to my personal website!
📝 Publications
Visual-Tactile Fusion-Driven Diffusion Policy for Robotic Excavation of Semi-Buried Objects in Granular Media
Linan Deng, Xing Liu, Yunlong Dong, Guijun Ma, Feng Hua, Cheng Cheng, and Zuogong Yue*
- Proposed a visual-tactile fusion-driven diffusion policy for excavating semi-buried objects in granular media.
A Robotic Tactile Excavation System for Excavating Objects Buried in Granular Materials
Linan Deng, Yasen Wang, Zuogong Yue, and Zhi Li*
- Developed a robotic tactile excavation system for excavating fully-buried objects via only multi-modal tactile sensing.
Active Learning-Aided Design of a Flexible Tactile Sensor Array for Recognizing Properties of Deformable Objects
Linan Deng, Jinghao Zhang, Zuogong Yue, Zhi Li, Ye Yuan*, and Han Ding
- Proposed an active learning-aided design framework to explore the optimum sensitiviy of the tactile sensor array.
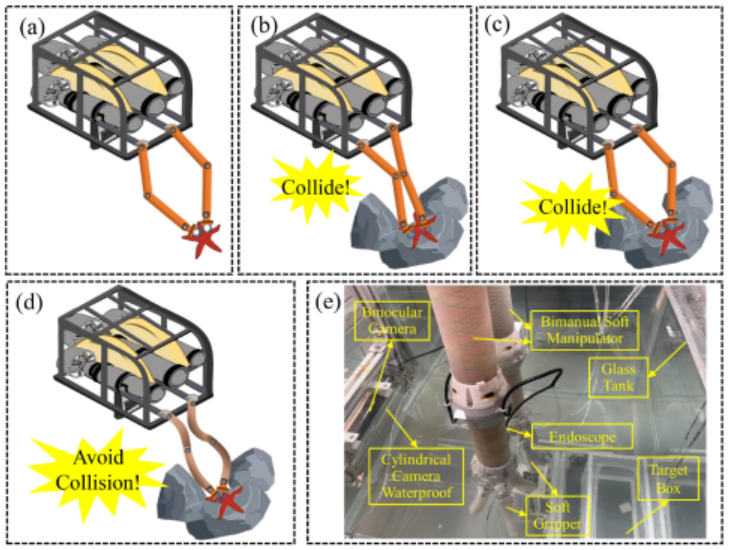
Planning and Motion Control for Underwater Bimanual Soft Manipulator in Underwater Grasping Task
Yi Shen, Ruochen Tai, Jinghao Zhang, Linan Deng, Ye Yuan*, Rong Su, Fumin Zhang, and Han Ding
- This work presents a planning and motion control framework for underwater bimanual soft manipulator in underwater grasping task.
Kinematic Control for Crossed-Fiber-Reinforced Soft Manipulator Using Sparse Bayesian Learning
Yi Shen, Linan Deng, Ye Yuan*, Fumin Zhang, and Han Ding
- This work presents a hydrostatic-skeleton-inspired soft manipulator with crossed-fiber and hybrid-material structures for controllable worm-like bending. A sparse-Bayesian-learning-based kinematic model and feedback controller enable accurate, low-vibration motion tracking.
Sen-Glove: A Lightweight Wearable Glove for Hand Assistance with Soft Joint Sensing
Linan Deng, Yi Shen, Yang Hong, Yunlong Dong, Xin He*, Ye Yuan, Zhi Li, and Han Ding
- Proposed an active learning-aided design framework to explore the optimum sensitiviy of the tactile sensor array.
Journal Papers
- Xing Liu, Yunlong Dong, Jun Wan, Linan Deng, Feng Hua, Yi Shen, Min Yu, Guijun Ma, Cheng Cheng, Haitao Song, Han Ding, and Ye Yuan*. (2026). DexAnyTwist: Learning General Dexterous Twisting with Hybrid Manipulation System Identification. National Science Review, nwag351. Paper | Project
- Linan Deng, Yasen Wang, Zuogong Yue, and Zhi Li*. (2025). A Robotic Tactile Excavation System for Excavating Objects Buried in Granular Materials. IEEE/ASME Transactions on Mechatronics, 30(6), 7112-7124. Paper
- Linan Deng, Jinghao Zhang, Zuogong Yue, Zhi Li, Ye Yuan*, and Han Ding. (2024). Active Learning-Aided Design of a Flexible Tactile Sensor Array for Recognizing Properties of Deformable Objects. IEEE Transactions on Instrumentation and Measurement, 73, 1-11. Paper
- Yi Shen, Ruochen Tai, Jinghao Zhang, Linan Deng, Ye Yuan*, Rong Su, Fumin Zhang, and Han Ding. (2023). Planning and Motion Control for Underwater Bimanual Soft Manipulator in Underwater Grasping Task. IEEE/ASME Transactions on Mechatronics, 29(4), 2487-2498. Paper
- Yi Shen, Linan Deng, Ye Yuan*, Fumin Zhang, and Han Ding. (2022). Kinematic Control for Crossed-Fiber-Reinforced Soft Manipulator Using Sparse Bayesian Learning. IEEE/ASME Transactions on Mechatronics, 27(2), 611-622. Paper
- Linan Deng, Yi Shen, Genglin Fan, Xin He, Zhi Li*, and Ye Yuan. (2022). Design of a Soft Gripper with Improved Microfluidic Tactile Sensors for Classification of Deformable Objects. IEEE Robotics and Automation Letters, 7(2), 5607-5614. Paper
Conference Papers
- Linan Deng, Xing Liu, Yunlong Dong, Guijun Ma, Feng Hua, Cheng Cheng, and Zuogong Yue*. (2025, August). Visual-Tactile Fusion-Driven Diffusion Policy for Robotic Excavation of Semi-buried Object in Granular Media. In International Conference on Intelligent Robotics and Applications (pp. 447-459). Singapore: Springer Nature Singapore. Paper
- Jingyu Yang*, Yi Shen, and Linan Deng. Continual Contrastive Anomaly Detection under Natural Data Distribution Shifts. In 2023 8th International Conference on Automation, Control and Robotics Engineering (CACRE) (pp. 144-149). IEEE. Paper
- Linan Deng, Yi Shen, Yang Hong, Yunlong Dong, Xin He*, Ye Yuan, Zhi Li, and Han Ding. (2022, May). Sen-glove: A lightweight wearable glove for hand assistance with soft joint sensing. In 2022 International Conference on Robotics and Automation (ICRA) (pp. 5170-5175). IEEE. Paper
- Ming Liu, Yang Hong, and Linan Deng*. (2022, August). Research on data construction and classification of deformable objects grasped by soft hand with multi-source information fusion. In 2022 34th Chinese Control and Decision Conference (CCDC) (pp. 6272-6276). IEEE. Paper
- Genglin Fan, Xiuchuan Tang*, Yi Shen, and Linan Deng. (2021, July). Model predictive control method for multi-motor system with dead zone. In 2021 6th International Conference on Automation, Control and Robotics Engineering (CACRE) (pp. 333-337). IEEE. Paper
National Invention Patents
- CN112880547B. Ye Yuan, Linan Deng, Yi Shen, Genglin Fan, and Yang Hong. Liquid metal-based tactile sensor, array and preparation method thereof (一种基于液态金属的触觉传感器、阵列及其制备方法)
- CN113576832B. Ye Yuan, Linan Deng, Yi Shen, Genglin Fan, and Ming Liu. Cable-driven modular soft rehabilitation glove (一种线驱模块化软体康复手套)
- CN110400306B. Zelin Deng, Yunlong Dong, Linan Deng, Xiuchuan Tang, Lianhua Deng, and Renguang Cao. Non-woven fabric defect detection method based on morphological fltering and convolutional neural network (基于形态学滤波和卷积神经网络的无纺布疵点检测方法)
- CN112229553B. Ye Yuan, Genglin Fan, Yi Shen, Linan Deng, and Xiuchuan Tang. Flexible tactile sensor based on light attenuation, array and preparation method thereof (一种基于光衰减的柔性触觉传感器、阵列及其制备方法)
- CN120516695A. Ye Yuan, Xin Sun, Han Ding, Cheng Cheng, Linan Deng, Zuogong Yue, Feng Hua, Zeyuan Yang, Xing Liu, Shichuang Wang, and Guijun Ma. Reorientation method of aviation parts with dexterous hands based on reinforcement learning and imitation learning (基于强化学习与模仿学习的灵巧手航空部件重定向方法)
- CN118330773A. Ye Yuan, Zelin Deng, Xin Sun, and Linan Deng. Underwater object detection method and system (一种水下物体探测方法及系统)
- CN112454421A. Ye Yuan, Yi Shen, Linan Deng, Yunlong Dong, and Xiuchuan Tang. Pneumatic worm-like soft manipulator and preparation method thereof (一种气动仿蠕虫软体操纵臂及其制备方法)
- CN114274162A. Ye Yuan, Jinghao Zhang, Yi Shen, and Linan Deng. Dielectric elastomer actuator, flexible foot, and starfsh-like soft robot (一种介电弹性体驱动器、柔性足和仿海星软体机器人)
🎖 Honors and Awards
Competition
- 2023.09. China International College Students’ “Internet+” Innovation Entrepreneurship Competition (Bronze Prize in HUST)
- 2022.08. Artificial Intelligence Conference and Entrepreneurs Summit Forum of China’s Optics Valley (Best Student Poster Award)
- 2022.08. China Postgraduate Robot Innovation and Design Competition (National Third Prize)
- 2015.11. Chinese Mathematics Competitions (National Second Prize)
Others
- 2023.12. Scholarship for Outstanding Doctoral Students, HUST
- 2022.12. Third Prize of Zhixing Scholarship, HUST
- 2021.11. Excellent Postgraduate Cadre, HUST
- 2018.06. Outstanding Graduate, HUST
📖 Educations
- 2019.09 - 2025.07. Ph.D. in Mechanical Engineering. School of Mechanical Science and Engineering, Huazhong University of Science and Technology.
Supervisors: Prof. Han Ding, Prof. Ye Yuan - 2018.09 - 2019.07. China-EU Institute for Clean and Renewable Energy, Huazhong University of Science and Technology.
- 2014.09 - 2018.07. B.E. in Marine Engineering. School of Naval Architecture and Ocean Engineering, Huazhong University of Science and Technology.
💬 Experiences
Review Activities
- IEEE/ASME Transactions on Mechatronics (T-Mech) (2026)
- IEEE Transactions on Instrumentation and Measurement (TIM) (2025)
- IEEE Robotics and Automation Letters (RA-L) (2021)
- IEEE International Conference on Robotics and Automation (ICRA) (2021, 2022, 2026)
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2021)
- Chinese Control and Decision Conference (CCDC) (2022)